Most process models consist of more than a single state and a single input. Techniques for linearization extend naturally to multivariable systems. The most convenient mathematical tools involve some linear algebra.
Here we develop a linear approximation to a process model for a system consisting of coupled gravity-drained tanks.
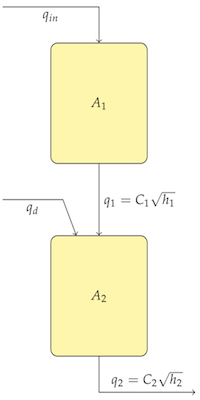
States
\begin{eqnarray*} x_{1} & = & h_{1}-\bar{h}_{1}\\ x_{2} & = & h_{2}-\bar{h}_{2} \end{eqnarray*}Control input $$u=q_{in}-\bar{q}_{in}$$
Disturbance input $$d=q_{d}-\bar{q}_{d}$$
Measured output $$y=h_{2}-\bar{h}_{2}$$
Taylor series expansion for the first tank
\begin{eqnarray*} \frac{dx_{1}}{dt} & = & f_{1}(\bar{h}_{1}+x_{1},\bar{h}_{2}+x_{2},\bar{q}_{in}+u,\bar{q}_{d}+d)\\ & \approx & \underbrace{f_{1}(\bar{h}_{1},\bar{h}_{2},\bar{q}_{in})}_{0}+\left.\frac{\partial f_{1}}{\partial h_{1}}\right|_{SS}x_{1}+\left.\frac{\partial f_{1}}{\partial h_{2}}\right|_{SS}x_{2}+\left.\frac{\partial f_{1}}{\partial q_{in}}\right|_{SS}u+\left.\frac{\partial f_{1}}{\partial q_{d}}\right|_{SS}d\\ & \approx & \left(-\frac{C_{1}}{2A_{1}\sqrt{\bar{h}_{1}}}\right)x_{1}+\left(0\right)x_{2}+\left(\frac{1}{A_{1}}\right)u+\left(0\right)d\\ & \approx & \left(-\frac{C_{1}^{2}}{2A_{1}\bar{q}_{in}}\right)x_{1}+\left(\frac{1}{A_{1}}\right)u \end{eqnarray*}Taylor series expansion for the second tank
\begin{eqnarray*} \frac{dx_{2}}{dt} & = & f_{2}(\bar{h}_{1}+x_{1},\bar{h}_{2}+x_{2},\bar{q}_{in}+u,\bar{q}_{d}+d)\\ & \approx & \underbrace{f_{2}(\bar{h}_{1},\bar{h}_{2},\bar{q}_{in})}_{0}+\left.\frac{\partial f_{2}}{\partial h_{1}}\right|_{SS}x_{1}+\left.\frac{\partial f_{2}}{\partial h_{2}}\right|_{SS}x_{2}+\left.\frac{\partial f_{2}}{\partial q_{in}}\right|_{SS}u+\left.\frac{\partial f_{2}}{\partial q_{d}}\right|_{SS}d\\ & \approx & \left(\frac{C_{1}}{2A_{2}\sqrt{\bar{h}_{1}}}\right)x_{1}+\left(-\frac{C_{2}}{2A_{2}\sqrt{\bar{h}_{2}}}\right)x_{2}+\left(0\right)u+\left(\frac{1}{A_{2}}\right)d\\ & \approx & \left(\frac{C_{1}^{2}}{2A_{2}\bar{q}_{in}}\right)x_{1}+\left(-\frac{C_{2}^{2}}{2A_{2}\bar{q}_{in}}\right)x_{2}+\left(\frac{1}{A_{2}}\right)d \end{eqnarray*}Measured outputs
\begin{eqnarray*} y & = & h_{2}-\bar{h}_{2}\\ & = & x_{2} \end{eqnarray*}A first-order reaction
$$A\longrightarrow\mbox{Products}$$takes place in an isothermal CSTR with constant volume $V$, volumetric flowrate in and out the same value $q$, reaction rate constant $k$, and feed concentration $c_{AF}$.
Consider the two-tank model. Assuming the tanks are identical, and using the same parameter values as used for the single gravity-drained tank, compute values for all coefficients appearing in the multivariable linear model. Is the system stable? What makes you think so?
Consider an isothermal CSTR with a single reaction $$A\longrightarrow\mbox{Products}$$ whose reaction rate is second-order. Assume constant volume, $V$, and density, $\rho$, and a time-dependent volumetric flow rate $q(t)$. The input to the reactor has concentration $c_{A,in}$.