CBE30338¶
Index of Figures in this Repository¶
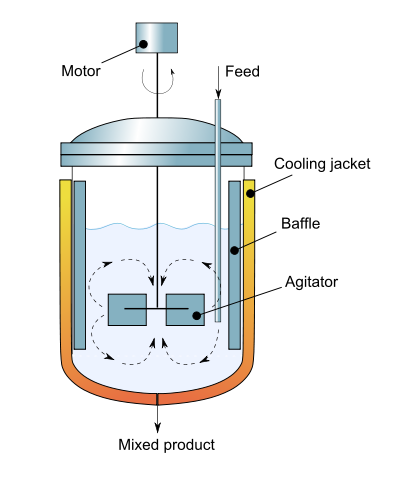
408px-Agitated_vessel.png¶
{kind=link}
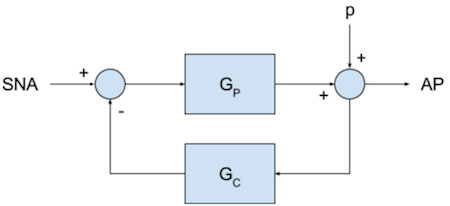
baroreflex.png¶
{kind=link}
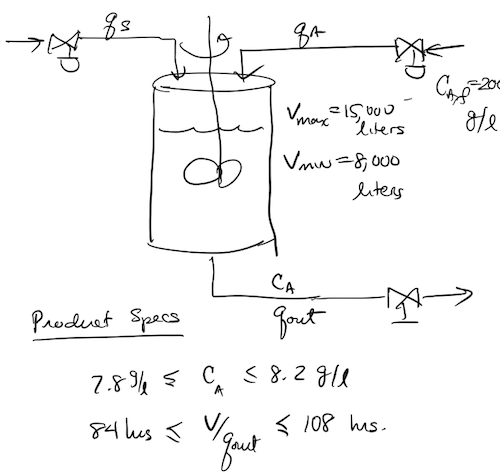
Continuous-Mixed-Tank.png¶
{kind=link}
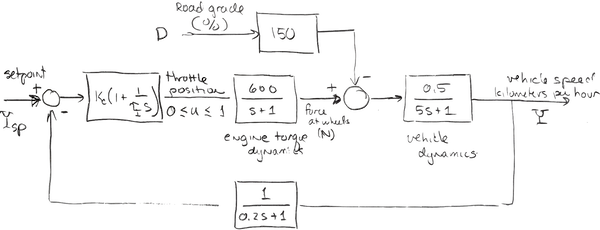
CruiseControl2.png¶
{kind=link}
CruiseControl.png¶
{kind=link}
E11-10.png¶
{kind=link}
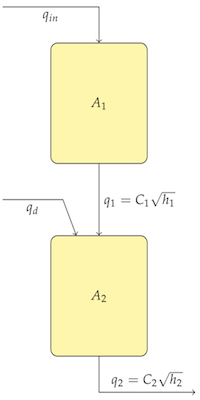
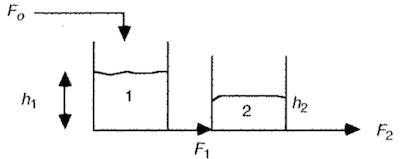
GravityDrainedTanks.png¶
{kind=link}
InteractingTanks.png¶
{kind=link}
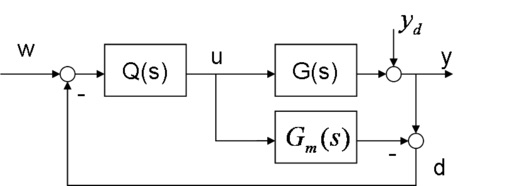
Internal_Model_Control.png¶
{kind=link}
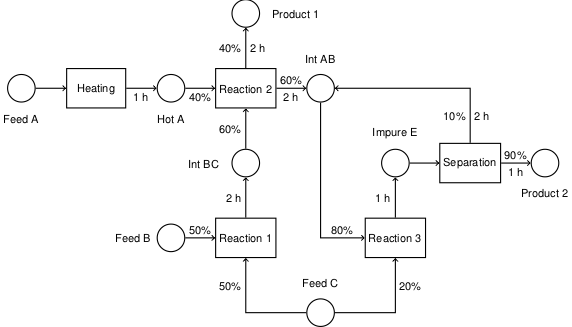
Kondili_1993.png¶
{kind=link}
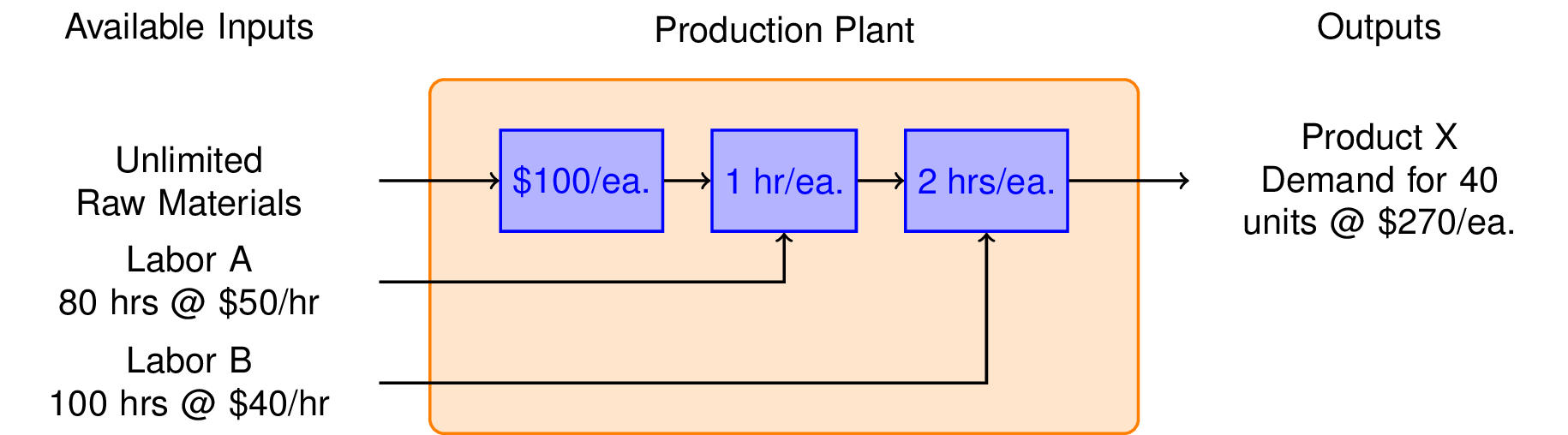
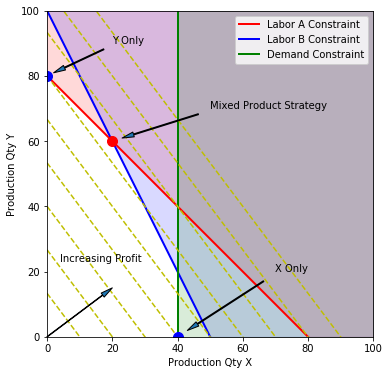
LP_ProductX.png¶
{kind=link}
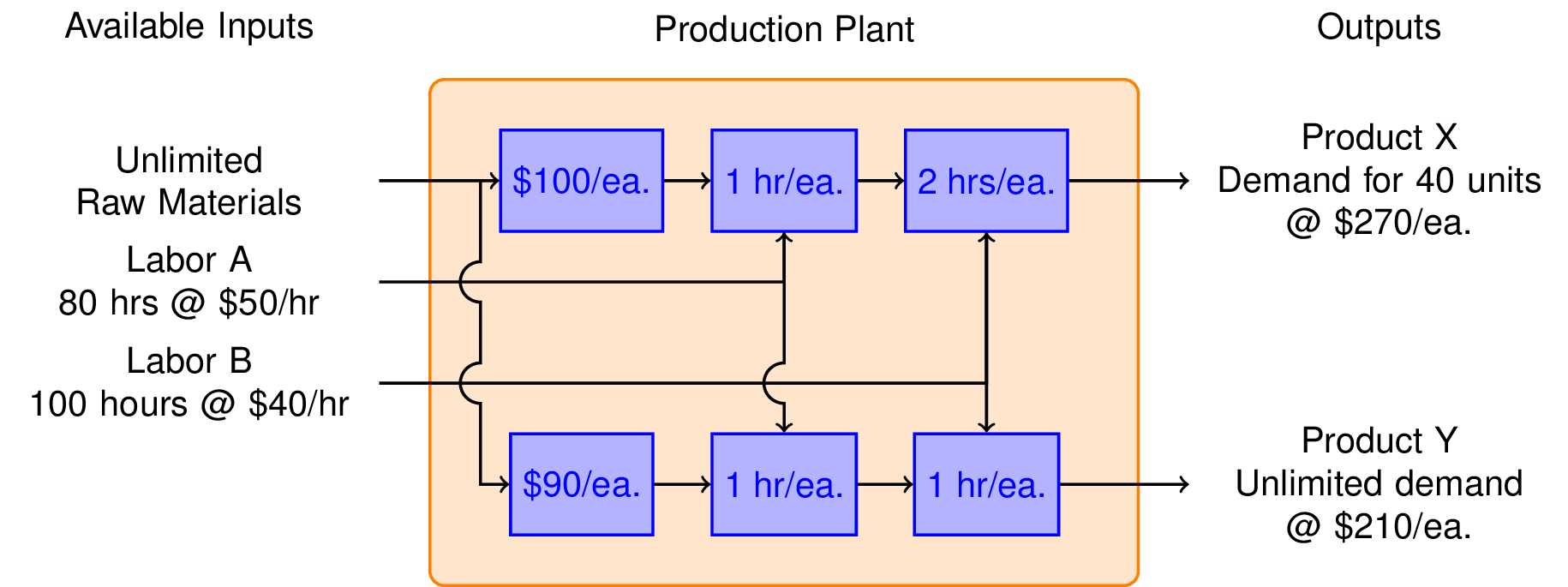
LP_ProductXY.png¶
{kind=link}
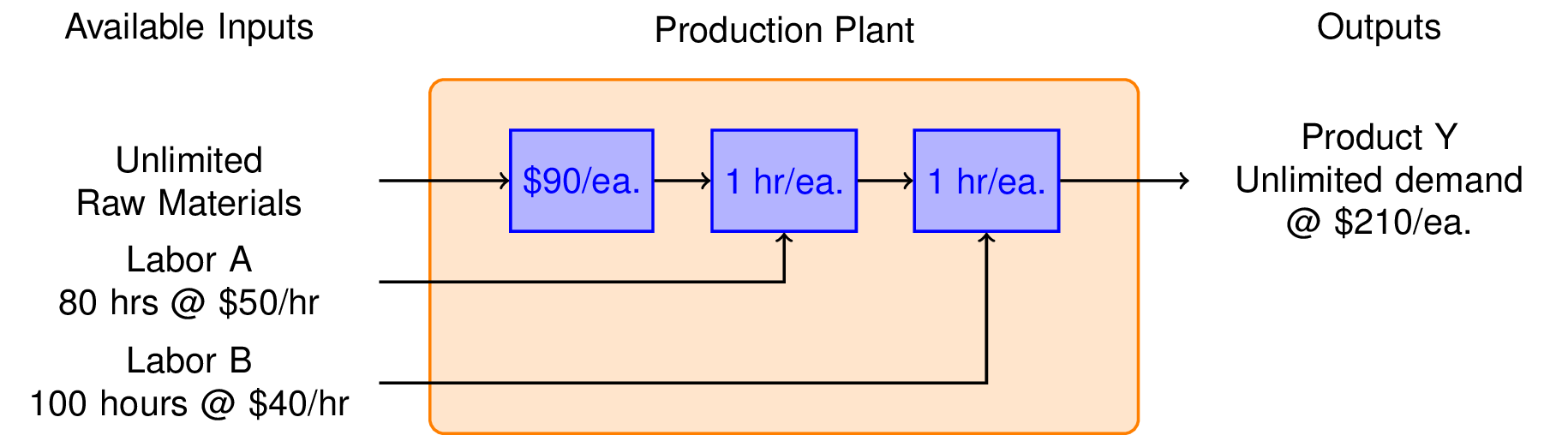
LP_ProductY.png¶
{kind=link}
LPprob01.png¶
{kind=link}
nihms-475924-f0001.jpg¶
{kind=link}
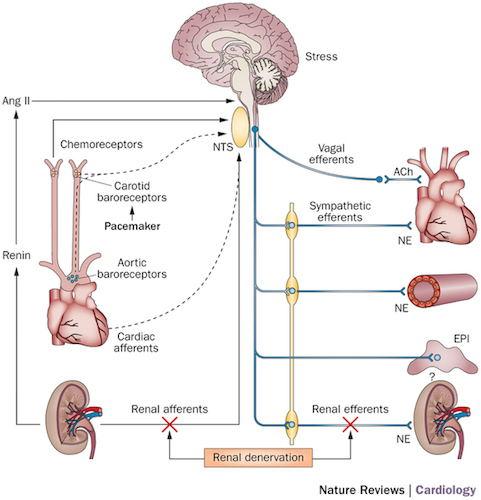
nrcardio.2015.96-f2.jpg¶
{kind=link}
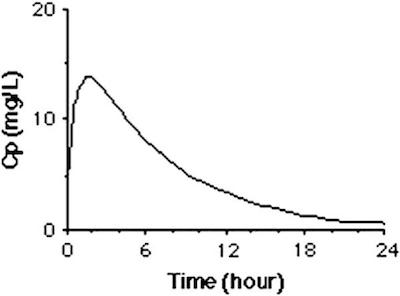
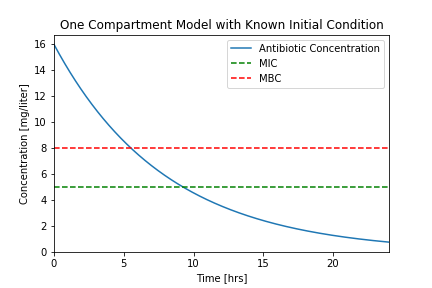
Pharmaockinetics1.png¶
{kind=link}
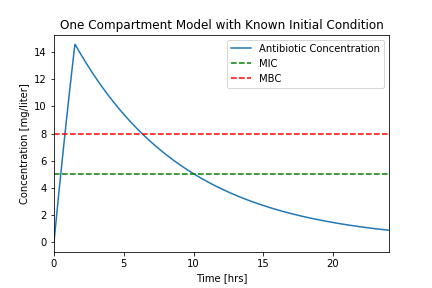
Pharmaockinetics2.png¶
{kind=link}
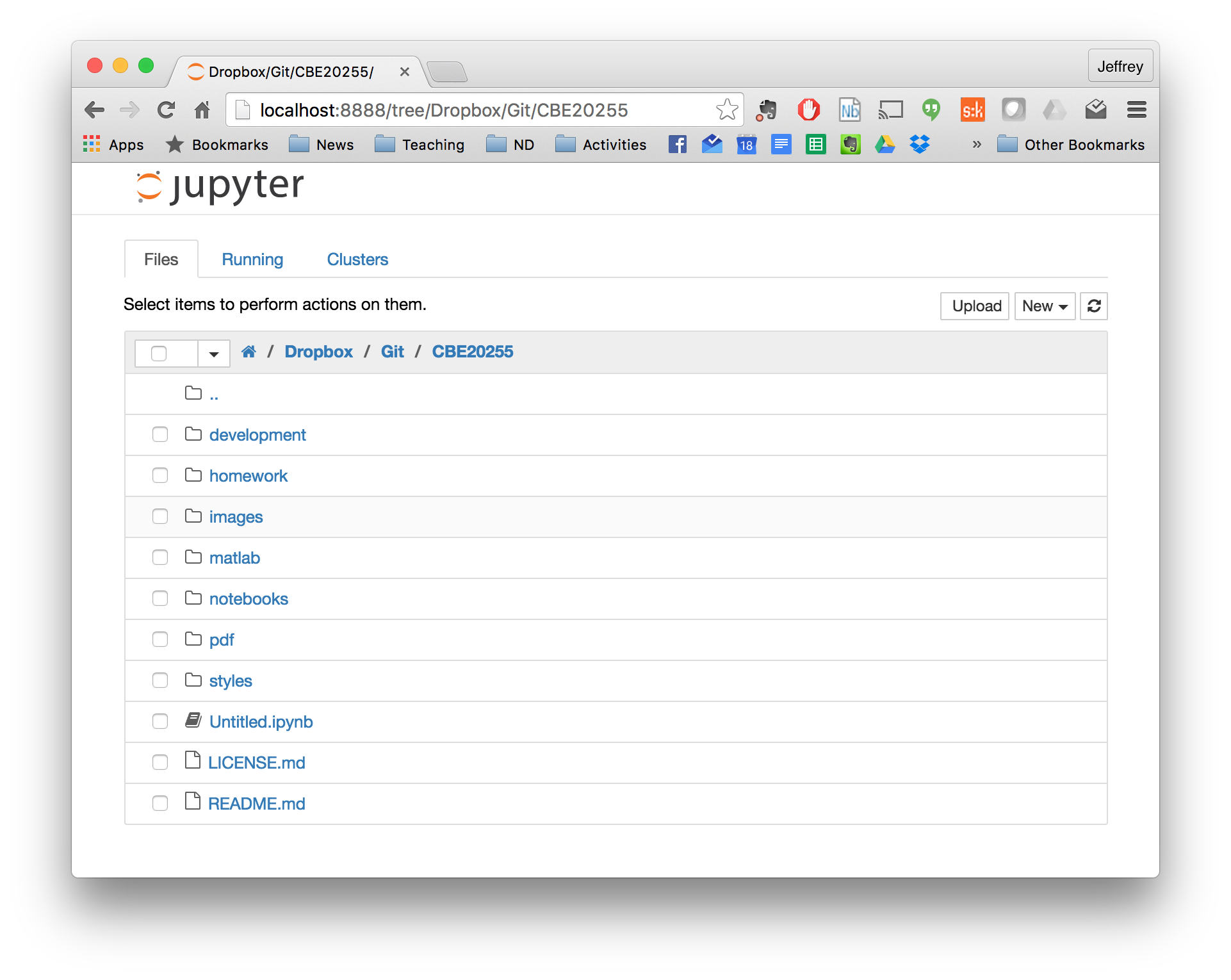
Screen-Shot-Jupyter-Session.png¶
{kind=link}